Rancang Bangun Pemandu Tuna Netra Menggunakan Sensor Ultrasonik Berbasis Mikrokontroler
Abstract
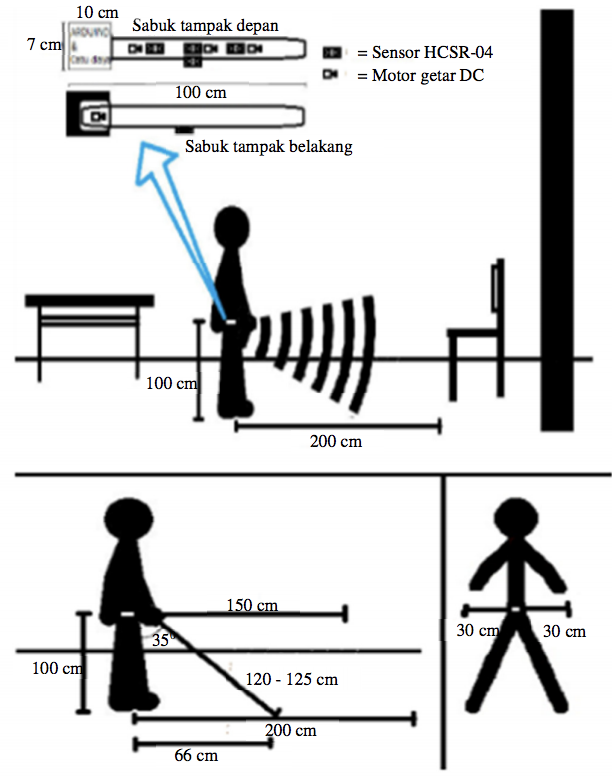
Penyandang tuna netra memiliki kondisi fisik yang terbatas. Kondisi fisik ini membuat penyandang menggunakan tongkat sebagai alat pemandu dalam kegiatan sehari-hari. Kemajuan teknologi membantu penyandang mengganti tongkat dengan alat pemandu menggunakan sensor ultrasonik sehingga lebih leluasa bergerak. Sensor ultrasonik bekerja dengan memanfaatkan gelombang ultrasonik sebagai pemancar dan menghitung jarak dengan perbedaan selisih waktu. Kepekaan sensor ultrasonik dari 2 cm sampai 200 cm. Pengolah data yang digunakan adalah mikrokontroler arduino dan keluaran berupa motor getar. Alat pemandu tuna netra menggunakan sabuk sebagai desain utama. Sensor diletakkan pada sisi kiri, depan, dan kanan sabuk untuk mendeteksi benda yang berada pada jarak pantulan sensor. Motor getar diletakkan pada samping sensor untuk memberikan getaran ketika sensor ultrasonik aktif. Alat pemandu tuna netra mempunyai spesifikasi dalam mendeteksi jarak 30 cm di kiri sabuk, 150 cm di depan sabuk, 30 cm di kanan sabuk dan 120 cm – 125 cm di bawah sabuk.
Downloads
Keywords

This work is licensed under a Creative Commons Attribution 4.0 International License