Optimasi Performansi Sistem Kontrol Prosthesis Lengan Dengan Menggunakan Metode PID Tuning Dengan MATLAB
Abstract
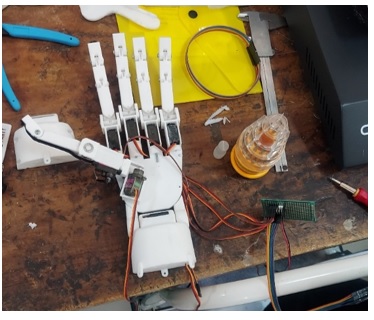
The arm prosthesis in this study will analyze the control system of one finger with 3 joints, the aim is to determine the optimal performance of the control system for the prosthesis using 3 combinations of software, namely autodesk fusion 360, autodesk inventor as the design of the arm prosthesis, and matlab simulink simscape multibody as a simulation of PID tuning with a value of 4.0715 for proportional (P), 99.3021 for integral (I), and 0.039866 for (D) resulting in a movement performance with a rise time of 0.00431 seconds, settling time of 0.026 seconds, and overshoot of 4.76%.
Downloads
References
[2] S. S. Noland, A. T. Bishop, R. J. Spinner, and A. Y. Shin, “Adult Traumatic Brachial Plexus Injuries,” Journal of the American Academy of Orthopaedic Surgeons, vol. 27, no. 19. 2019. doi: 10.5435/JAAOS-D-18-00433.
[3] I. Vujaklija, D. Farina, and O. C. Aszmann, “New developments in prosthetic arm systems,” Orthopedic Research and Reviews, vol. 8. Dove Medical Press Ltd., pp. 31–39, Jul. 07, 2016. doi: 10.2147/ORR.S71468.
[4] I. A. Satam and I. A. Satam, “Review Studying of the Latest Development of Prosthetic Limbs Technologies,” Int J Sci Eng Res, vol. 12, 2021, [Online]. Available: http://www.ijser.org
[5] L. A. Miller et al., “Control of a Six Degree of Freedom Prosthetic Arm After Targeted Muscle Reinnervation Surgery,” Arch Phys Med Rehabil, vol. 89, no. 11, pp. 2057–2065, Nov. 2008, doi: 10.1016/J.APMR.2008.05.016.
[6] A. Kelleher, B. Dicianno, S. Eckstein, R. Schein, J. Pearlman, and R. Cooper, “Consumer Feedback to Steer the Future of Assistive Technology Research and Development: A Pilot Study,” Top Spinal Cord Inj Rehabil, vol. 23, pp. 89–97, Feb. 2017, doi: 10.1310/sci2302-89.
[7] M. S. Widodo and W. Jatmiko, “Design of prosthesis arm control based on microcontroller,” J Phys Conf Ser, vol. 1363, 2019.
[8] M. S. Al-Smadi and S. Y. Ababneh, “Real-time model reference adaptive control for upper-limb prosthetic device.,” Appl Bionics Biomech, 2019.
[9] Laure Anne Pessina, “A prosthetic that restores the sense of where your hand is,” Jun. 04, 2019. wevolver.com/article/a.prosthetic.that.restores.the.sense.of.where.your.hand.is (accessed Jan. 08, 2023).
[10] T. M. Wang, “The application of DC motor control on the robotic arm.,” In Proceedings of the 11th International Conference on Electrical and Electronics Engineering (ICEEE), 2017.
[11] J. A. Lie, T. D. Wulandari, and H. Kurniawan, “Tuning PID dan Robust Control pada Sistem Kontrol Gerakan Prosthesis Lengan Berbasis Motor DC.,” Jurnal Pendidikan Vokasi, vol. 8(3), 2018.
[12] B. Harsono, A. Setiyawan, and M. Rifa’i, “Pengontrolan Prosthesis Lengan dengan Metode Kontrol Adaptif dan PID.,” Jurnal Nasional Teknik Elektro dan Teknologi Informasi, vol. 8(2), 2019.
[13] M. A. Al-Faaham, M. A. Al-Dabbas, and M. Al-Rousan, “Performance Enhancement of Upper-Limb Prosthetic Control Using Robust Control.,” SN Comput Sci, vol. 1(5), 2020.
[14] D. Suryadi, M. Ardiansyah, and Y. Khairi, “Robust control method to improve the performance of an upper-limb prosthetic.,” International Seminar on Application for Technology of Information and Communication, 2019.
[15] B. Neogi, S. K. S. Islam, P. Chakraborty, S. Barui, and A. Das, “Introducing MIT rule toward improvement of adaptive mechanical prosthetic arm control model,” in Advances in Intelligent Systems and Computing, 2018, vol. 518, pp. 379–388. doi: 10.1007/978-981-10-3373-5_38.
[16] J. Zhang, M. Zhang, W. Shi, and Y. Gu, “Robust Control of an Upper Limb Prosthesis Using an Interval Model.,” IEEE Access, vol. 8, 2020.
[17] G. Dewantoro, D. Susilo, and P. Pideksa Adi, “Implementasi Pengendali Logika Fuzzy pada Navigasi Robot Penjejak Dinding,” Teknologi Elektro, vol. 16, no. 02, 2017.
[18] Komponen, “Teori Motor Dc dan Jenis-Jenis Motor DC,” Teori Elektronika, 2022. Teori Motor DC Dan Jenis-Jenis Motor DC Read more at: http://elektronika-dasar.web.id/teori-motor-dc-dan-jenis-jenis-motor-dc/ Copyright © Elektronika Dasar
[19] M. A. Alharbi, H. A. Al-Mashary, and A. Y. Al-Nasheri, “High-Performance Speed Control of a DC Motor Based on PI Control.,” Journal of Control, Automation and Electrical Systems, vol. 32(2), 221-232), 2021.
[20] A. N. Aliansyah, N. Nurhayati, S. N. Jaya`, L. Pagiling, W. O. S. N. Alam, and M. N. A. Nur, “Analisis Tuning Parameter PID Menggunakan Algoritma Genetika pada Pengontrolan Kecepatan Motor DC,” Majalah Ilmiah Teknologi Elektro, vol. 21, no. 2, p. 287, Dec. 2022, doi: 10.24843/mite.2022.v21i02.p17.
[21] W. Widhiada, T. G. T. Nindhia, and N. Budiarsa, “Robust Control for the Motion Five Fingered Robot Gripper,” Int. J. Mech. Eng. Robot. Res., vol. 4, no. 3, pp. 226-232, 2015.

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.

This work is licensed under a Creative Commons Attribution 4.0 International License