Pembacaan Jarak dan Kecepatan dengan ArUco Marker pada Sistem Koper Follow Me Beroda
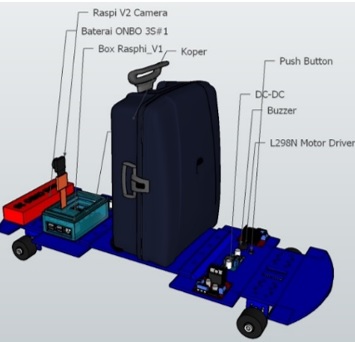
Koper Follow Me Beroda merupakan robot otomatis yang dapat mengikuti perjalanan manusia untuk membawa barang dalam memenuhi keperluanya. Koper ini memiliki 2 mode; mode manual dan otomatis. Mode manual koper akan digunakan layaknya koper pada pada umumnya. Sedangkan mode otomatis, koper akan selalu mengikuti pemiliknya yang sudah memiliki tanda khusus (markers). Komponen utama sistem adalah kamera raspberry pi, raspberry pi 4, push button, buzzer, driver motor dan motor dc. Dengan melakukan image processing pada tanda khusus (markers) sehingga menghasilkan variabel jarak. Hasil pengolahan pembacaan variabel jarak akan diproses mejadi variabel kecepatan, sehingga range data error akan didapatkan. Penggunaan marker tipe ArUco Marker, pembatasan jarak pembacaan tanda khusus dengan jarak maksimal sejauh 2 meter yang sebisa mungkin stabil pada jarak 1 meter.Untuk mengantisipasi kegagalan pembacaan digunakan buzzer sebagai tanda bahwa Koper Follow Me telah jauh dari penggunanya. Pada hasil pengujian dengan menggunakan marker tipe ArUco Markers dihasilkan jarak minimal 74 mm, maksimal 2170 mm. Dengan tingkat error pembacaan paling kecil pada jarak 400 mm dan 1100 mm sedangkan untuk error pembacaan paling besar pada jarak 2000 mm dan untuk rata-rata error hasil pembacaan jarak sebesar 0,55 %.
Abstract
The Wheeled Follow Me Suitcase is an automatic robot that can follow human journeys to carry goods to meet their needs. This suitcase has 2 modes; manual and automatic modes. The manual mode of the suitcase will be used like a suitcase in general. While the automatic mode, the suitcase will always follow the owner who already has a special mark (markers). The main components of this system are raspberry pi camera, raspberry pi 4, push button, buzzer, motor driver and dc motor. By doing image processing on special marks (markers) so as to produce a variable distance. The results of processing the reading of the distance variable will be processed into a speed variable, so that the error data range will be obtained. The use of markers of the ArUcoMarker type, limits the distance for reading special marks to a maximum distance of 2 meters which is as stable as possible at a distance of 1 meter. To anticipate failure in reading, a buzzer is used as a sign that the follow me suitcase has been far from the user. In the test results using markers of the ArUco Markers type, a minimum distance of 74 mm is produced, a maximum of 2170 mm. With the smallest reading error rate at a distance of 400 mm and 1100 mm while the largest reading error at a distance of 2000 mm and for the average distance reading error of 0.55%.
Downloads
References
[2] Sari, Anita dan Ramdan, Sigit Doni. 2021. Pengembangan Koper Pintar Berbasis Arduino. Jurnal Teknik Komputer dan Teknik Elektro Universitas Teknokrat Indonesia.
[3] Listiana. Reni, Damayanti. Eva, Prasetyo. Hadi dan Amirullah, Akbar. 2021. Rancang Bangun Koper Pintar Berbasis Mikrokontroller. Jurnal Politeknik TEDC Bandung.
[4] Jatmiko, Wisnu dkk. 2012. Robotika : Teori dan Aplikasi. Fakultas Ilmu Komputer Universitas Indonesia.
[5] (2021) Camera Module. [Online]. Available: https://www.raspberrypi.org/documentation/hardware/camera/.
[6] Pramono, Basworo Ardi. Hendrawan, Aria. Daru, April Firman. 2018. Raspberry Pi Dengan Modul Kamera dan Motion Sensor Sebagai Solusi CCTV Lab FTIK UNIV. Semarang. Jurnal Fakultas Teknologi Informasi & Komunikasi Universitas Semarang.
[7] Eriyani, Vina. Triyanto, Dedy. Nirmala, Irma. 2018. Rancang Bangun Robot Pelayan Restoran Otomatis Berbasis Mikrokontroler Atmega16 Dengan Navigasi Line Follower. Jurnal. Jurusan Rekayasa Sistem Komputer, Fakultas MIPA Universitas Tanjungpura.
[8] Sutono. Nursoparisa, Asri. 2019. Perancangan Sistem Kendali Automatisasi Control Debit Air pada Pengisian Galon Menggunakan Modul Arduino. Jurnal Fakultas Teknik Universitas Suryakancana.
[9] Hamid, Riskha Mirandha. Rizky. Amin Mohamad. Bagus, Ida. 2016. Rancang Bangun Charge Baterai untuk Kebutuhan UMKM. Jurnal Teknik Elektronika dan Teknik Mesin Politeknik Negeri Balikpapan.
[10] Listianto, Rio Dwi. Sunardi. Puriyanto, Riky Dwi. 2019. Monitoring Tegangan Baterai Lithium Polymer pada Robot Sepak Bola Beroda secara Nirkabel. Jurnal Program Studi Teknik Elektro, Universitas Ahmad Dahlan.
[11] Ardyanto, B. 2019. Pengukuran Tegangan, Arus dan Daya Listrik Menggunakan Perangkat Telepon Pintar.
[12] Tarmizi, Nurma Aula. 2019. Sistem Pengaturan Kecepatan Airan Keluaran Tangki Air Menggunakan Kontroler PID Dilengkapi Sistem Monitoring Berbasis IOT. Jurnal Teknik Elektronika Politeknik Negeri Malang.
[13] Tanaya, Zhafir Afif Dwi. Nurcahyo, Sidik. Priyadi, Bambang. 2021. Sistem Peringatan dan Monitoring Jumlah Pengunjung Pada Ruangan Dalam Rangka Physical Distancing Berbasis IoT. Jurnal Teknik Elektronika Politeknik Negeri Malang.
[14] (2021) Detection of ArUco Markers. [Online]. Available: https://docs.opencv.org/3.4/d5/dae/tutorial_ArUco_detection.html
[15] Supriyanto, Hadi. Afifah, Nur. Budiyarto, Aris. 2019. Sistem Kendali Quadcopter Melalui Jaringan Internet Berbasis Lokasi dan Pengenalan Marker Menggunakan Smartphone. Jurnal Jurusan Teknik Otomasi Manufaktur dan Mekatronika, Politeknik Manufaktur Bandung.
[16] Fathoni. 2016. Rancang Rangkaian H-Bridge untuk Motor DC 12 V 5 A. Jurnal Politeknik Negeri Malang.
[17] Salsabila, Azhaar. Parastiwi, Andriani. Safitri, Hari Kurnia. 2021. Sistem Monitoring dan Controlling Emisi Gas Amonia di Kandang Pembesaran Ayam Pedaging Dengan Metode PID Berbasis Internet of Things. Jurnal Teknik Elektronika Politeknik Negeri Malang.
[18] Pratiwi, Syaidinati Hakiki Angesti. 2020. Implementasi Kontrol Proposional Integral Pada Pengaturan Kecepatan Putar Motor DC Untuk Meningkatkan Produksi Kue Kecik. Jurnal Teknik Elektronika Politeknik Negeri Malang.
[19] Febrianto, Ronaldo. Priyadi, Bambang. Singgih, Hariyadi. 2021. Pengatur Kecepatan Motor DC Hight Torque Untuk Sistem Pengontrol Tekanan Pada Proses Pencetakan Filament (3D Printing) Berbahan Daur Ulang Dengan Metode PID. Jurnal Teknik Elektronika Politeknik Negeri Malang.
[20] Fahmizal. Fathuddin, Fahmy. Susanto, Rudi. 2018. Identifikasi Sistem Motor DC danKendali Linear Quadratic Regulator Berbasis Arduino-Simulink Matlab. Jurnal Departemen Teknik Elektro dan Informatika, Sekolah Vokasi, Universitas Gadjah Mada.
[21] Henriques, Pedro Paulo de Jesus Costa. Agung, I. G. A. P. Raka. Jasa, Lie. 2018. Rancang Bangun Sensor Jarak sebagai Alat Bantu Memarkir Mobil berbasiMikrokontroler Arduino Uno. Jurnal Teknik Elektro dan Komputer Fakultas Teknik Universitas Udayana,
[22] Al-Fani, Handri. Sumarno. Jalaluddin. Hartam, Dedy dan Gunawan, Indra. 2020. Perancangan Alat Monitoring Pendeteksi Suara di Ruangan Bayi RS Vita Insani Berbasis Arduino Menggunakan Buzzer. Jurnal SMIK Budida.

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.

This work is licensed under a Creative Commons Attribution 4.0 International License