Pengembangan Three Degree of Freedom Hexapod sebagai Robot Pemadam Api dengan Sensor UVTron Hamamatsu
Abstract
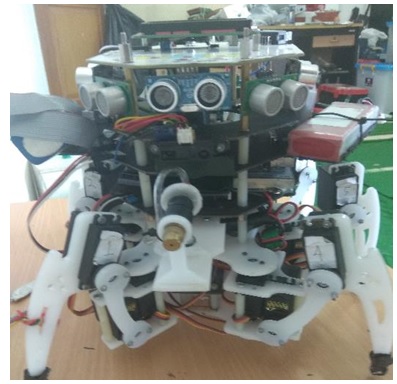
The objective of this project is to design and develop an hexapod robot that can locate fire and extinguish it. The design of the robot consists of mechanical or frame, electronics, and software designs. The hexapod robot is a robot with six legs. The legs are driven by servo motors with Three Degree of Freedom (3DOF) to smooth the movement. The servo control uses Torobot 32 Channel servo controller. The fire detection and estinguishing capability are designed using ultrasonic and infrared sensors together with Uvtron sensor. The fire detection system uses Uvtron Hamamats which detects the presence of ultraviolet light through the sensor tube with detection distance up to five meters. The main controller of the robot is Arduino Mega 2560 microcontroller. The algorithm of the robot movement uses wall-following technique to trace the space hence safe path for the robot to move. The robot will move through the room until it locates a fire and then activate the pump to extinguish it, and performs a fire check again. The performance of the robot is tested following typical room simulation as described in the guidelines of Indonesian Robotic Contest.
Downloads
References
R. Bouge, “Finishing robots: a review of technologies and applications,” Industrial Robot: An International Journal, vol. 36, no. 1, pp. 6-12, 2009.
L. Royakkers and R. V. Est, “A literature review on new robotics: Automation from Love to War,” International Journal of Social Robotics, vol. 7, no. 5, pp. 549-570, 2015.
Y. Ferando, M. A. and M. A. Murshid, “Improving Productivity: A review of robotic applications in food industry,” International Journal of Robotics and Technologies, vol. 4, no. 1, pp. 42-58, 2016.
Aldebaran Robotics, “NAO Humanoid,” Humanoid Robot Platform, France, 2012.
Honda Motor, ASIMO Technical Information, Japan: Honda, 2007.
M. I Dewa Gede Rai, “Rancang Bangun Robot Electronic Nose untuk mengidentifikasi gas menggunakan multi layer perceptron,” Jurnal Nasional Teknik Elektro dan Teknologi Informasi, vol. 3, no. 3, pp. 222-230, 2014.
E. Guizzo, “Japan Earthquake: Robots Help Search For Survivors,” Spectrum IEEE, 14 March 2011. [Online]. Available: spectrum.ieee.org. [Accessed 2017].
QinetiQ, “Modular Advanced Armed Robotic System (MAARS),” QinetiQ, North America, 2008.
Badan Nasional Penanggulangan Bencana, “Data dan Informasi Bencana Indonesia,” BNPB, [Online]. Available: dibi.bnpb.go.id.
D. J. Pack, R. Avanzato, D. J. Ahlgreen and I. M. Verner, “Fire-fighting mobile robotics and interdisciplinary design-comparative perspectives,” IEEE Transactions on Education, vol. 47, no. 3, pp. 369-376, 2004.
E. Krasnov and D. Bagaey, “Conceptual analysis of fire fighting robots'control systems,” in International Conference Problems of Cybernetics and Informatics PCI, Baku, 2012.
K. Altaf, A. Akbar and B. Ijaz, “Design and construction of an autonomous fire fighting robot,” in International Conference on Information and Emerging Technologies, Karachi, 2007.
Ristekdikti, “Panduan Kontes Robot Pemadam Api Indonesia 2017,” Kemristekdikti, Jakarta, 2017.
Electrohouse, “32 Channels Servo Controller Manual,” Electrohouse, 2011.
Arduino, “Arduino Board Mega 2560,” Arduino, [Online]. Available: www.arduino.com.
TowerPro, “TowerPro MG995,” TowerPro, [Online]. Available: www.towerpro.com.tw.
D. Susilo and R. A. Nugroho, “Wall Following Algortithm,” Fakultas Teknik PS Teknik Elektro dan Sistem Komputer Universitas Kristen Satya Wacana, Salatiga.
T. Fincannon, L. E. Barnes, R. R. Murphy and D. L. Riddle, “Evidence of the need for social inteligence in rescue robots,” in International Conference on Intelligent Robots and Systems (IROS), 2004.
I. W. D. Pranata, I. B. A. Swamardika and I. N. Budiastra, “Rancang Bangun Quadrupod Robot Berbasis ATmega1280 Dengan Kaki Kembar,” in CSGTEIS 2013, Bali, 2013.

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.

This work is licensed under a Creative Commons Attribution 4.0 International License