Rancang Bangun Robot 6WD Dengan Sensor Gas TGS2600 Menggunakan Metode Wall Following Berbasis Arduino Mega 2560
Abstract
Intisari— Perkembangan teknologi khususnya dibidang robotika saat ini sangat pesat, Salah satu bentuk aplikasi dari teknologi robotika yang erat kaitannya dengan sistem kontrol adalah wheel mobile robot. Beberapa metode dapat dilakukan untuk mendistribusikan gas alam salah satunya dengan pipa. Distribusi gas alam dengan menggunakan pipa sering mengalami kendala kebocoran yang disebabkan usia dari pipa distribusi yang sudah cukup tua. Untuk mempermudah pemantauan pipa gas yang berada di bawah tanah digunakan robot 6 WD (wheel drive) yang memiliki 6 roda dan penggerak pada setiap rodanya untuk mengatasi medan yang berat. Pergerakan dari robot 6 WD mengacu pada sensor ultrasonik SRF HC-SR04, metode ini dinamakan wall following. Sensor gas tipe TGS dari figaro dimanfaatkan untuk mengetahui adanya kebocoran gas pada pipa atau tidak. Selain itu, robot ini juga dilengkapi dengan kamera untuk mengirim gambar kerusakan pipa pada user agar dapat segera dilakukan perbaikan.
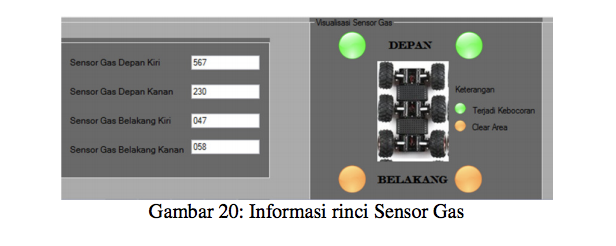
Arduino Mega 2560 digunakan sebagai otak pada robot 6 WD yang bertugas untuk mengolah data yang masuk dan memberikan instruksi pada robot 6WD. Pengiriman data dari robot 6 WD pada pengguna meliputi, data sensor gas, data sensor kompas, data sensor jarak dan gambar kerusakan pada pipa. Seluruh data dapat dilihat pada GCS (Ground Control Station).
[TRUNITIN CHECK 20%, 26042017]
Downloads
References
[2] Istadi, D. (2013) Chemical Engineering. [online]. Available: http://tekim.undip.ac.id/staf/istadi/files/2013/09/01-introduction-natural-gas-processing .pdf/
[3] I.B.A. Swamardika, I.N. Budiastra, I.N. Setiawan, Yogi Hendrayanto, I.P.A.M. Pratama, “Rancang Bangun Robot 6WD Sebagai Alat Pendeteksi Kebocoran Gas CO dan Bhutana Berbasis Komunikasi Wireless Xbee Pro Series 1 60 mW,”Jurnal Teknik Elektro Universitas Udayana, pp. 52-57, 2015.
[4] “TGS2600 data sheet,” Figaro, USA.
[5] F.Z. Rachman, Nur Yanti, “Robot Penjejak Ruangan dengan Sensor Ultrasonik dan Kendali Ganda Melalui Bluetooth,” Jurnal Elektronika Terpadu Politeknik Negeri Balikpapan, Vol.4, pp. 114 – 119, Oktober.
[6] “SRF HC-SR04 data sheet,” Elec Freaks, China.
[7] Ari Begnarly, Hendy Wicaksono, “Pengaplikasian TPA81 dan CMPS03 Pada Rancang Bangun Robot Beroda KRPAI 2013,” Jurnal Ilmiah Mahasiswa Universitas Surabaya, Vol. 2, 2013.
[8] Sukindar (2016) Kelebihan Bahasa Pemrograman C#. [online]. Available: https://teknojurnal.com/kelebihan-bahasa-pemrograman-c-sharp/
[9] As’Ari. “Perancangan Robot Wall Follower dengan Metode Proportional Integral Derivative (PID) Berbasis Mikrokontroller,” Universitas Andalas. 2013.
[10] Fahmizal (2013) Robot Wall Follower. [Online]. Available: https://fahmizaleeits.wordpress.com/ 2012/09/30/robot-wall-follower-dengan-kendali-pid/
Keywords

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.

This work is licensed under a Creative Commons Attribution 4.0 International License