Analisis Kinerja Pengendali Kaskade Pada Sistem Load Frequency Control (LFC) Hidraulik Menggunakan PIDTune Model Standard
Abstract
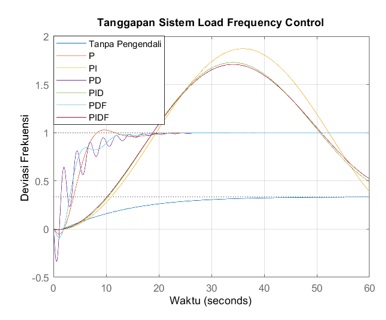
This study evaluates the performance of a hydraulic Load Frequency Control (LFC) system using cascade controllers in various configurations with and without droop characteristics. Through MATLAB simulation, several types of controllers such as P, PI, PD, PID, PDF, and PIDF are analysed to measure transient response parameters such as rise time, peak time, steady state time, and overshoot. The results show that the droop configuration provides better performance, with faster response and reduced oscillation compared to the other configurations. The use of filters in PIDF and PDF controllers is very effective in dampening high frequency disturbances and improving system stability. The PDF and PIDF controllers, thanks to their derivative components, showed the best performance with fast response times and minimal overshoot. Overall, droop configurations, especially with PDF controllers, are recommended to maintain frequency stability in hydraulic LFC systems, especially under dynamic load conditions.
Downloads
References
[2] V. T. W. Vina, “Analisis Setting Speed Droop dan Deadband Governor Unit 1 PLTA Maninjau Sebagai Pengaturan Frekuensi pada Sistem 150 KV,” J. Tek. Energi, vol. 11, no. 2, pp. 25–29, 2023, doi: 10.35313/energi.v11i2.3912.
[3] I. P. Riasa, R. S. Hartati, I. B. G. Manuaba, and D. A. S. Santiari, “Pengaruh PLTB Sidrap Terhadap Sistem Kelistrikan Sulawesi Selatan,” Maj. Ilm. Teknol. Elektro, vol. 19, no. 1, p. 27, 2020, doi: 10.24843/mite.2020.v19i01.p04.
[4] Oladiran Kayode Olajiga, Emmanuel Chigozie Ani, Zamathula Queen Sikhakane, and Tosin Michael Olatunde, “Assessing the Potential of Energy Storage Solutions for Grid Efficiency: a Review,” Eng. Sci. Technol. J., vol. 5, no. 3, pp. 1112–1124, 2024, doi: 10.51594/estj.v5i3.974.
[5] G. Liu, J. H. Park, C. Hua, and Y. Li, “Hybrid Dynamic Event-Triggered Load Frequency Control for Power Systems With Unreliable Transmission Networks,” IEEE Trans. Cybern., vol. 53, no. 2, pp. 806–817, 2023, doi: 10.1109/TCYB.2022.3163271.
[6] S. Asgari, M. B. Menhaj, A. A. Suratgar, and M. G. Kazemi, “A disturbance observer based fuzzy feedforward proportional integral load frequency control of microgrids,” Int. J. Eng. Trans. A Basics, vol. 34, no. 7, pp. 1694–1702, 2021, doi: 10.5829/IJE.2021.34.07A.13.
[7] E. Noviyani and P. Harjono, “I-1 Studi Pelepasan Beban Pada Skema Pertahanan (Defence Scheme) Jaringan Sistem Khatulistiwa,” pp. 1–7, 2023, [Online]. Available: https://media.neliti.com/media/publications/191211-ID-studi-pelepasan-beban-pada-skema-pertaha.pdf
[8] D. Marsudi, “Operasi Sistem Tenaga Listrik,” Graha Ilmu, no. April, pp. 2–5, 2006.
[9] H. D. Laksono and R. ‘Aisya, “Frequency Domain Analysis of Load Frequency Control Using PIDTune Model Standard,” Andalas J. Electr. Electron. Eng. Technol., vol. 3, no. 1, pp. 44–51, 2023, doi: 10.25077/ajeeet.v3i1.38.
[10] A. J. Pakpahan and Herlambang Setiadi, “Optimal Control Design for Frequency Regulation in Electric Power System With Low Inertia,” J. Adv. Technol. Multidiscip., vol. 3, no. 1, pp. 26–36, 2024, doi: 10.20473/jatm.v3i1.59984.
[11] D. Wahyudi, “Analisis Kestabilan Transient dan Pelepasan Beban saat terjadi Gangguan pada Pembangkit di PTPN X (Persero) PG. Ngadiredjo Kediri,” J. Tek. Elektro, vol. 07, no. 2, pp. 113–120, 2018, [Online]. Available: https://jurnal-lp2m.umnaw.ac.id/index.php/JP2SH/article/view/339/295
[12] P. Kundur, “Power System Stability and Control,” Power System Stability and Control. 2007. doi: 10.1201/9781420009248.
[13] M. Kusriyanto, H. S. Utama, and I. Effendi, “Prototype of Automatic Frequncy Control in Microhydro Power Plant with Dummy Load Based on Arduino Uno and Labview,” Teknoin, vol. 27, no. 1, pp. 1–8, 2021, doi: 10.20885/teknoin.vol27.iss1.art1.
[14] H. Bevrani, “Robust Power System Frequency Control,” Robust Power Syst. Freq. Control, 2009, doi: 10.1007/978-0-387-84878-5.
[15] S. Y. Bhuran and S. P. Jadhav, “Design of PID, IMC and IMC based PID Controller for Hydro Turbine Power System of Non-minimum Phase Dynamics,” J. Robot. Control, vol. 5, no. 2, pp. 416–426, 2024, doi: 10.18196/jrc.v5i2.21342.
[16] A. K. Baliarsingh, S. K. Mohapatra, and P. M. Dash, “Fractional Order PD(1+ PI) Controller for Frequency Control of Power System with Renewable Sources and Electric Vehicle,” Electrica, vol. 24, no. 2, pp. 406–424, 2024, doi: 10.5152/electrica.2024.23143.
[17] I. M. A. Nugraha, I. G. M. N. Desnanjaya, L. G. G. Serihollo, and J. S. M. Siregar, “Perancangan Hybrid System PLTS dan Generator Sebagai Catu Daya Tambahan Pada Tambak Udang Vaname: Studi Kasus Politeknik Keluatan Dan Perikanan Kupang,” Maj. Ilm. Teknol. Elektro, vol. 19, no. 1, p. 121, 2020, doi: 10.24843/mite.2020.v19i01.p18.
[18] C. S. M. Da Silva, N. J. F. Da Silva, F. A. D. C. Ayres Junior, R. L. P. De Medeiros, L. E. S. E. Silva, and V. F. De Lucena, “Experimental Implementation of Hydraulic Turbine Dynamics and a Fractional Order Speed Governor Controller on a Small-Scale Power System,” IEEE Access, vol. 12, no. March, pp. 40480–40495, 2024, doi: 10.1109/ACCESS.2024.3375349.
[19] A. Adrianti, M. Nasir, and A. R. Salvayer, “Skema Pelepasan Beban Menggunakan Relai Rate of Change of Frequency dengan Supervisi Under Frequency Relay,” Maj. Ilm. Teknol. Elektro, vol. 19, no. 2, p. 249, 2020, doi: 10.24843/mite.2020.v19i02.p18.
[20] A. Fernández-Guillamón, E. Muljadi, and A. Molina-García, “Frequency control studies: A review of power system, conventional and renewable generation unit modeling,” Electr. Power Syst. Res., vol. 211, no. January, 2022, doi: 10.1016/j.epsr.2022.108191.
[21] B. Maharmi, I. Cholid, Syafii, and E. H. Arya, “Optimization of speed droop governor operation at the gas turbine cogeneration unit,” Indones. J. Electr. Eng. Comput. Sci., vol. 33, no. 1, pp. 20–30, 2024, doi: 10.11591/ijeecs.v33.i1.pp20-30.
[22] A. A. Aloukili, T. M. Nasser, S. Abuzaid, and M. A. Mehanna, “Improved of Load Frequency Control in a Three-Area Non-Reheat System Using Hybrid Fuzzy-PI Controller and PIDF based on Mountain Gazelle Optimizer,” International Journal of Renewable Energy Research, vol. 13, no. 4. pp. 1632–1645, 2023. doi: 10.20508/ijrer.v13i4.14242.g8841.
[23] A. G. Wibisono, “Sistem pengendali robot bergerak lurus dengan kontrol Proporsional Integral Derivatif (PID) berbasis LabView,” Telekontran, vol. 3, no. 2, pp. 13–24, 2015.
[24] P. M. Dash, A. K. Baliarsingh, and S. K. Mohapatra, “Frequency control of power system with electric vehicles using hybrid african vultures optimization algorithm and pattern search tuned fuzzy PID controller,” EAI Endorsed Trans. Energy Web, vol. 10, pp. 1–14, 2023, doi: 10.4108/EW.135.
[25] D. V. Doan, K. Nguyen, and Q. V. Thai, “Load-Frequency Control of Three-Area Interconnected Power Systems with Renewable Energy Sources Using Novel PSO~PID-Like Fuzzy Logic Controllers,” Engineering, Technology and Applied Science Research, vol. 12, no. 3. pp. 8597–8604, 2022. doi: 10.48084/etasr.4924.
[26] M. Mokhtar, M. I. Marei, M. A. Sameh, and M. A. Attia, “An Adaptive Load Frequency Control for Power Systems with Renewable Energy Sources,” Energies, vol. 15, no. 2, pp. 1–22, 2022, doi: 10.3390/en15020573.
[27] Y. V. Hote and S. Jain, “PID controller design for load frequency control: Past, Present and future challenges,” IFAC-PapersOnLine, vol. 51, no. 4, pp. 604–609, 2018, doi: 10.1016/j.ifacol.2018.06.162.

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.

This work is licensed under a Creative Commons Attribution 4.0 International License