Desain dan Implementasi Kendali Digital Proportional-Integral pada Cuk Converter
Abstract
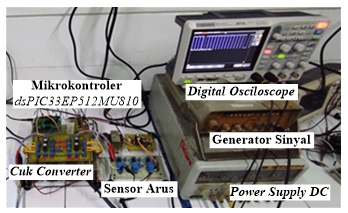
DC-DC converter are required in industrial application to convert a fixed DC voltage into a variable DC voltage. This article focuses on the cuk converter topology which can operate in buck-boost mode which is regulated through the duty cycle pulse width modulation setting and controlled by the dsPIC33EP512MU810 microcontroller by applying the Proportional-Integral (PI) digital closed loop current control method. Using PI control method is considered capable of producing optimal performance and increasing the response time that occurs. The frequency given by the generator signal is used as a reference signal to inject current into the inductor (L1). The current sensor module acts as a measuring device and a reader of the actual current value that appears through the load. The difference between the reference current value and the actual value will produce an error signal value so that it becomes the comparison value of the current sensor results with the PI control method. Simulation results on PSIM, modeling analysis, device implementation and hardware testing graphs in the laboratory have been carried out to prove the design parameters and proposed methods can work as intended.
Downloads
References
[2] S. A. Lopa, S. Hossain, M. K. Hasan, and T. K. Chakraborty, “Design and Simulation of DC-DC Converters Design and Simulation of DC-DC Converters,” no. January, 2016.
[3] P. S. Nasional et al., “DESAIN DAN IMPLEMENTASI KENDALI DIGITAL HISTERESIS PADA TOPOLOGI SEPIC BUCK-BOOST KONVERTER,” pp. 1–10, 2021.
[4] A. Musyafa, I. R. Gustawan, M. K. Asy, A. Rahmadiansyah, and R. D. Noriyati, “Development of Power Electronics ,Buck Boost Converter, Based PI-PID Control On Horizontal Wind Turbine Generation, For Low Rate Wind speed,” Aust. J. Basic Appl. Sci., vol. 11, no. August, pp. 79–87, 2017.
[5] P. Manisankar, N. S. Kumar, N. V. Bharathi, and G. Balasubramanian, “Design and Implementation of CUK Converter,” vol. 2, pp. 43–46, 2017.
[6] B. K. Kushwaha and A. Narain, “Controller design for Cuk converter using model order reduction,” ICPCES 2012 - 2012 2nd Int. Conf. Power, Control Embed. Syst., vol. 2, pp. 0–4, 2012.
[7] Abdelhakim Belkaid, Ilhami Colak, Korhan Kayisli, and Ramazan Bayindir, “Design and Implementation of a Cuk Converter Controlled by a Direct Duty Cycle INC-MPPT in PV Battery System | Belkaid | International Journal of Smart Grid - ijSmartGrid,” Int. J. Smart Grid, vol. 3, no. 1, pp. 19–25, 2019.
[8] A. Jayadi, T. Susanto, and F. D. Adhinata, “Sistem Kendali Proporsional pada Robot Penghindar Halangan (Avoider) Pioneer P3-DX,” Maj. Ilm. Teknol. Elektro, vol. 20, no. 1, p. 47, 2021.
[9] H. N. Shoumi, I. Sudiharto, and E. Sunarno, “Design of the CUK converter with PI controller for battery charging,” Proc. - 2020 Int. Semin. Appl. Technol. Inf. Commun. IT Challenges Sustain. Scalability, Secur. Age Digit. Disruption, iSemantic 2020, pp. 403–407, 2020.
[10] M. Bildirici and A. Karaarslan, “Analysis of Cuk Converter Using Pi and Occ Control Method,” vol. 2, no. September, pp. 1–5, 2017.
[11] C. Rachman and F. N. Budiman, “Rancang Bangun Konverter Buck Boost dengan Sistem Monitoring Berbasis Labview,” 2018.
[12] M. I. Pradana, M. Agus, and I. Setiawan, “Menggunakan Dspic30F4011 Dengan Metode Kontrol Proportional Integral,” Dep. Tek. Elektro, vol. 7, 2018.
[13] I. Ferdiansyah, Irianto, and E. Sunarno, “Penerapan Kontrol PI Pada Alat Pengaduk dan Pengukus Adonan Pudak untuk Meningkatkan Hasil Produksi Industri Rumah Tangga di Gresik,” J. Teknol. Terpadu, vol. 2, no. 8, pp. 134–143, 2020.
[14] C. Buku Asli, KONTROL PID UNTUK PROSES INDUSTRI Beragam Struktur dan Metode Tuning PID praktis (Iwan Setiawan). 2008.
[15] F. A. Sandjojo and I. Setiawan, “Menggunakan Dspic30F4011 Dengan Metode Kontrol Hysteresis.”
[16] M. N. Riandana, I. N. Budiastra, and C. G. I. Partha, “Aplikasi Sensor Cahaya Sebagai Sensor Garis Pada Robot Berbasis Kontrol PID Dengan Pengaturan Kepekaan Cahaya Otomatis,” Maj. Ilm. Teknol. Elektro, vol. 16, no. 3, p. 56, 2017.
[17] E. W. Saputra, H. Hermawan, and I. Setiawan, “Sistem Kontrol Injeksi Arus pada Inverter Berbasis Metode Proportional Integral,” Teknik, vol. 41, no. 2, pp. 186–191, 2020.
[18] F. Arifin, “PID Controller,” Electronics\Project\Focus, no. Mv, pp. 1–9, 2019.
[19] L. Wang, “Chapter 1 Basics of PID Control,” no. March, 2020.
[20] A. Karaarslan, “the Implementation of One Cycle Control Method To Inverting Buck-Boost Converter,” no. June, 2018.
[21] P. V. G. K. Rao, M. V. Subramanyam, and K. Satyaprasad, “Study on PID controller design and performance based on tuning techniques,” 2014 Int. Conf. Control. Instrumentation, Commun. Comput. Technol. ICCICCT 2014, pp. 1411–1417, 2014.
[22] A. Ahmady, “Pengembangan Algoritma Sistem Kendali Cerdas dengan Metode Adaptive Fuzzy untuk Inverted Pendulum,” pp. 1–15.
[23] A. Laksana, I. Setiawan, and Sumardi, “BALANCING ROBOT BERODA DUA MENGGUNAKAN METODE KENDALI PROPORSIONAL INTEGRAL Andra,” pp. 2–9.

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.

This work is licensed under a Creative Commons Attribution 4.0 International License